Publications
2025
-
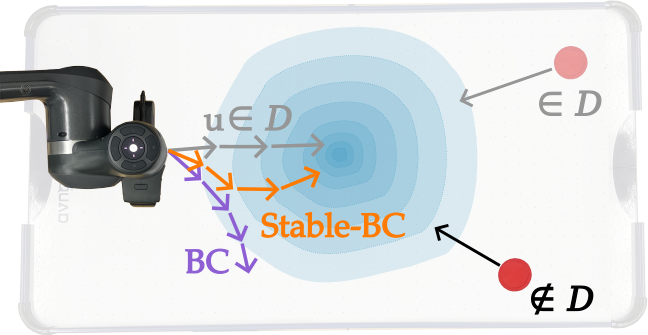
- Stable-BC: Controlling covariate shift with stable behavior cloningIEEE Robotics and Automation Letters 2025
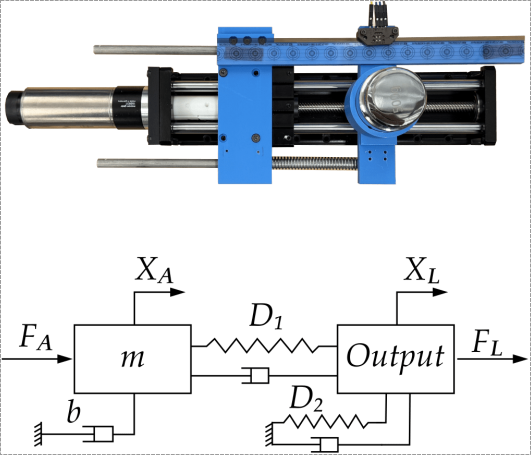
- Combining and Decoupling Rigid and Soft Grippers to Enhance Robotic ManipulationSoft Robotics 2025

-
2024
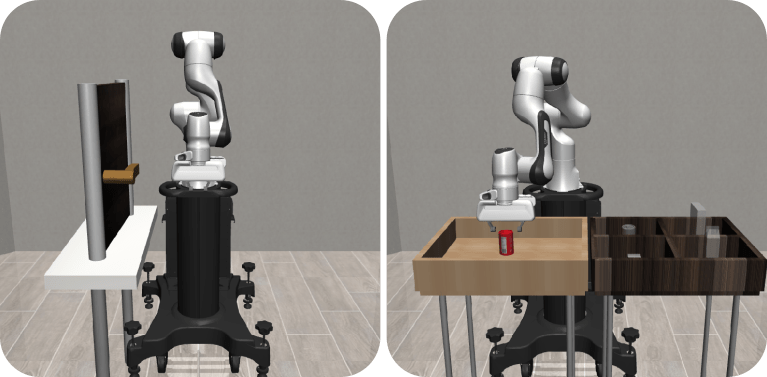
- Waypoint-Based Reinforcement Learning for Robot Manipulation Tasks2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024
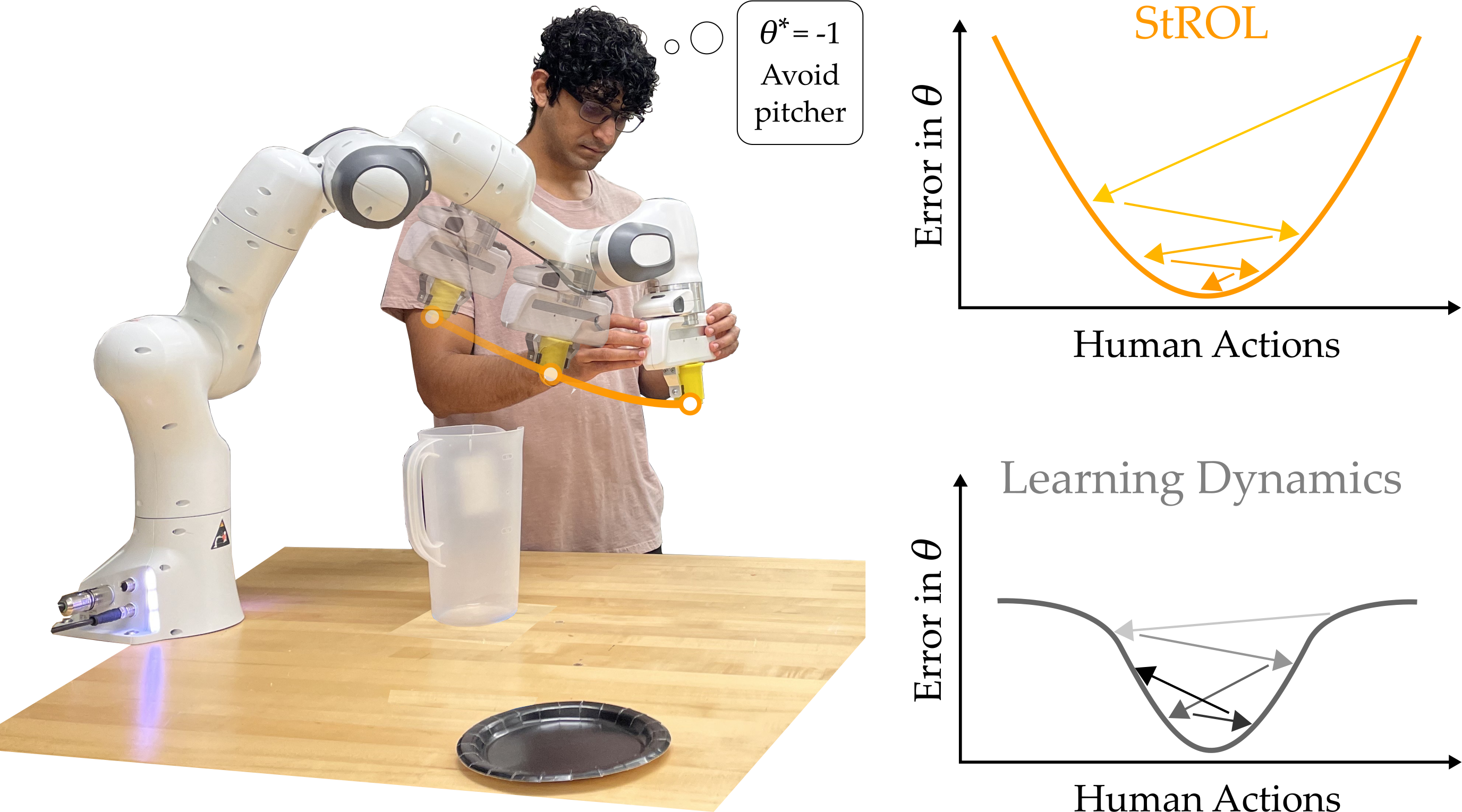
- StROL: Stabilized and Robust Online Learning from HumansIEEE Robotics and Automation Letters 2024
-
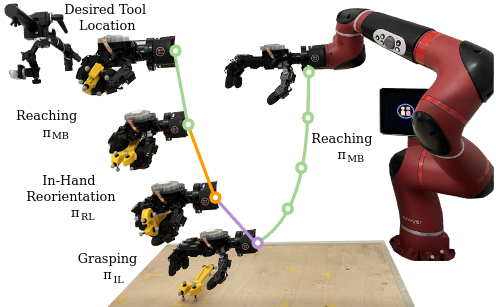
- On the feasibility of a mixed-method approach for solving long horizon task-oriented dexterous manipulation2024 IEEE-RAS 23rd International Conference on Humanoid Robots (Humanoids) 2024
2023
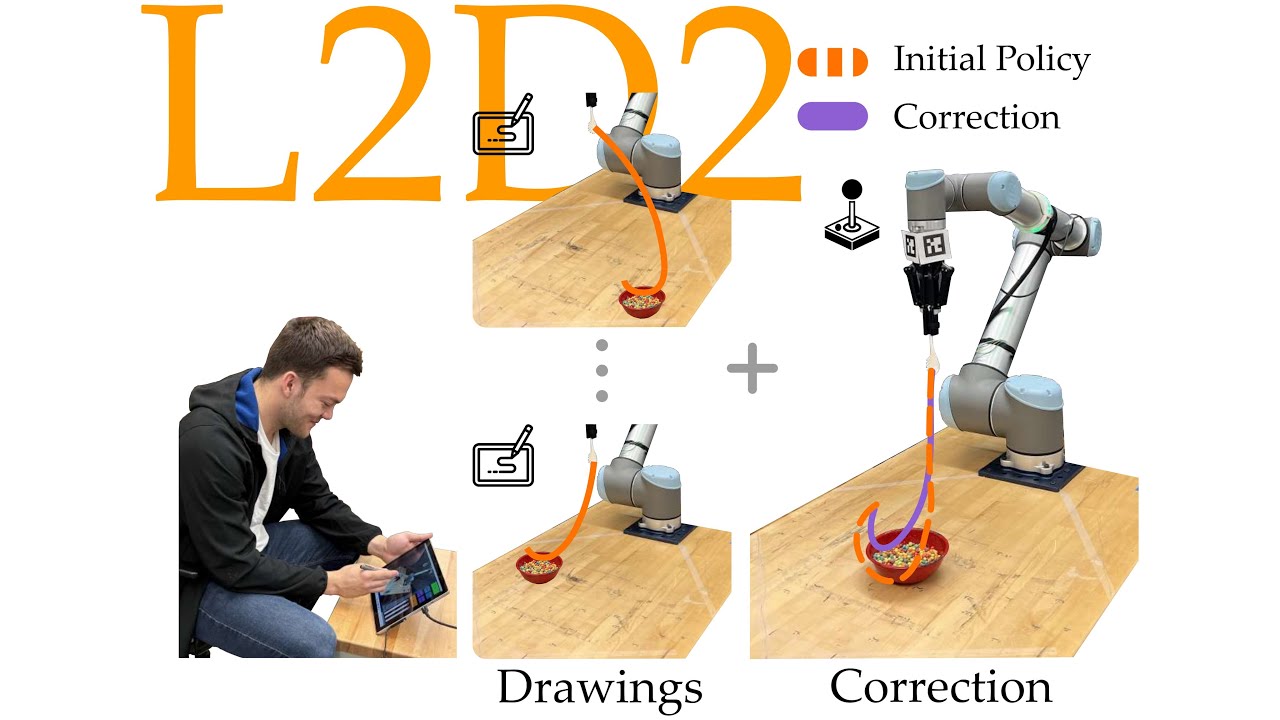
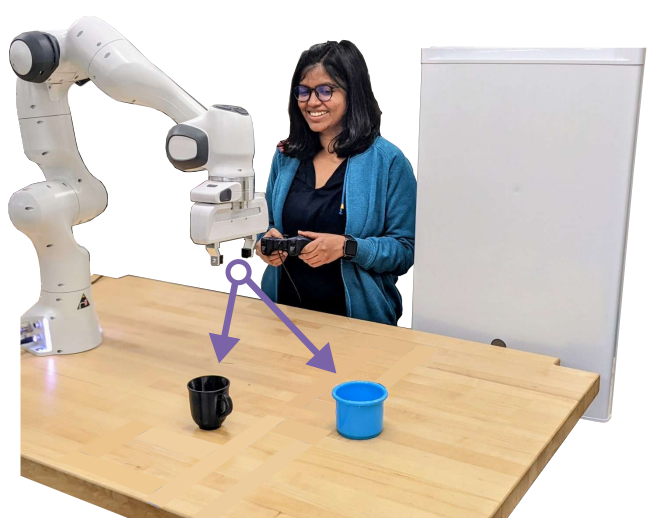
- Unified learning from demonstrations, corrections, and preferences during physical human-robot interactionACM Transactions on Human-Robot Interaction 2023

- RISO: Combining Rigid Grippers with Soft Switchable AdhesivesIEEE International Conference on Soft Robotics (Robosoft) 2023

2022
- Learning latent actions without human demonstrationsIEEE International Conference on Robotics and Automation (ICRA) 2022